JOIN/SIGN UP
Already a Member? |
GET INVOLVED
Understanding and Engaging in COVESA Expert Groups & Projects |
COLLABORATIVE PROJECTS
HISTORICAL
SDV Telemetry Project |
Already a Member? |
Understanding and Engaging in COVESA Expert Groups & Projects |
SDV Telemetry Project |
By Maarten Koning, Wind River Fellow

In automobiles, the amount of data generated, stored and collected – and the number of applications
deployed within vehicles to process all this content – has increased dramatically over the last
decade. Due to digital transformation, the modern automobile is now a supercomputer on wheels.
Vehicle workloads can run concurrently on today’s multi-service integration platforms thanks to
high-powered silicon that’s vital to mobile computation platforms.
Continuous Integration (CI), Continuous Deployment (CD) and Continuous Testing (CT) are practices
that enable more frequent, lower-ceremony release of the software payloads that are activated as
services and applications on a vehicle platform. With CI/CD/CT, a lot of the heavy lifting is done
up-front during the software development process which enables these payloads to be taken forward
in a largely automated fashion using tooling.
In a complex system like a vehicle, we want the granularity of those released software payloads to
be smaller than an entire system to parallelize CI/CD/CT. This is done using element separation.
Element separation is a software architecture best practice for many reasons as it helps with:
1. Preventing fault propagation so we know which payload caused a software (SW) failure.
2. Provisioning of compute and memory resources so we can engineer the system.
3. Simplifying implementation for SW teams by separating functions from each other.
4. Securing credentials to the time and place needed - the “least privilege principle.”
5. Providing various producers of SW (e.g., ISVs) their own private execution environment.
6. Easier management of software lifecycle using granular independent SW elements.
7. Containment of software with specialized core values (e.g., safety or real-time SW).
8. Reuse of software elements across systems, projects and hardware.
9. Workload orchestration and optimization such as SW load balancing and scaling.
These separated software elements are the vehicle applications and services that are activated as
one or more multi-threaded processes which comprise the vehicle workloads. It is becoming
increasingly helpful to wrap one or more of these services and applications into discrete operating
systems (OS) containers so that they can avoid interference from other services and applications
with which they don’t need to be tightly coupled. One of the advantages of containerizing services
and applications is that they can use, and be delivered with, an OS that is composed of the optimal
set of files, libraries and support services for their needs.
Host operating systems run on physical or virtual hardware whereas containers share an underlying
host OS – although they don’t see one other and so they ‘think’ they have their own OS instance.
This is not unlike when multiple host operating systems run on the same CPU cluster using a
hypervisor, as in both cases the applications see what looks like their own OS instance and OS
object namespace. This practice of containerizing payloads so they each have their own logical OS
instance helps reduce interference between payloads and between the underlying host OS and the
payloads themselves as well.
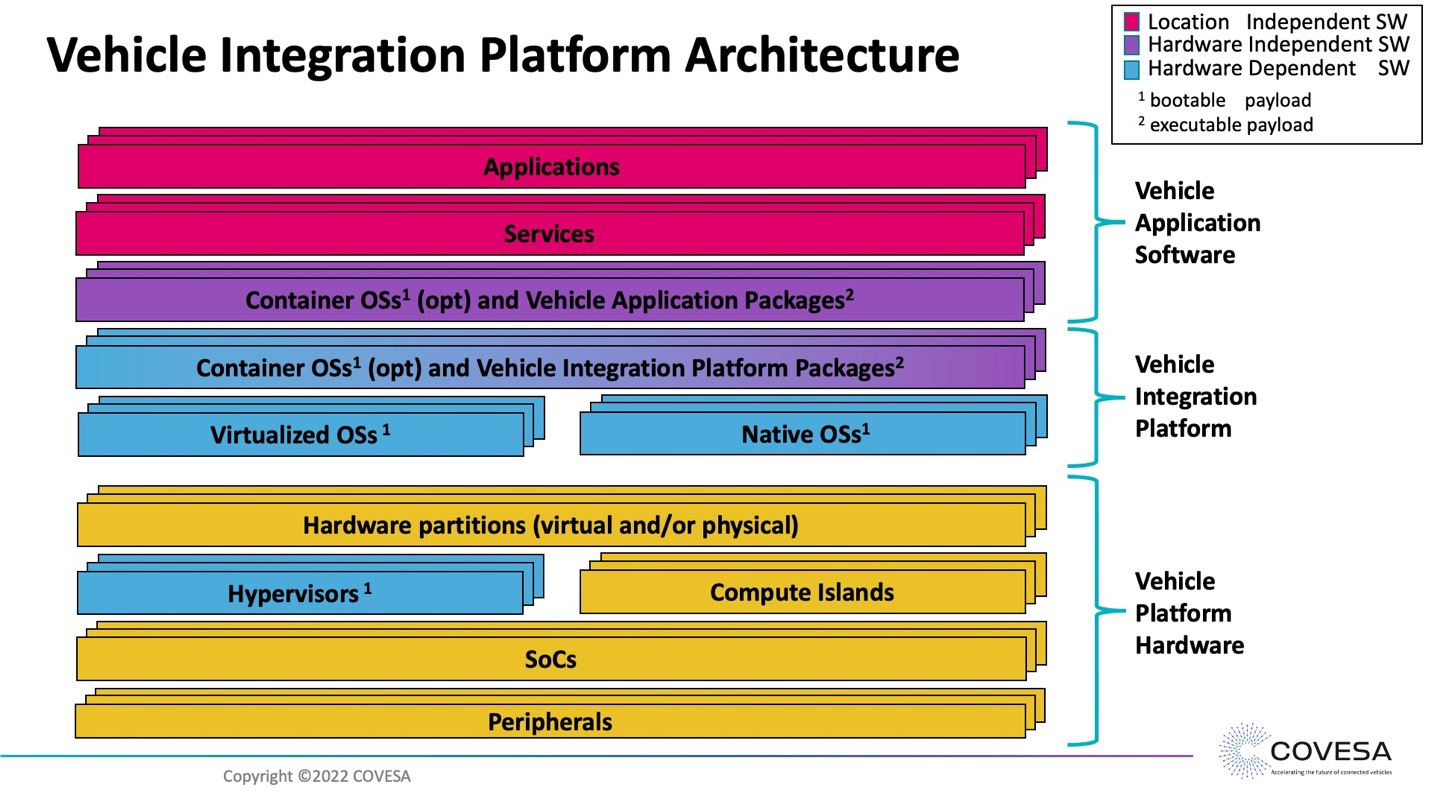
One could extend this notion of providing applications and services their own OS instance to
compute islands, since they provide a hardware mechanism for OS separation in SoCs without
requiring virtualization or container technology to do it. Whether virtualization, containers or
compute islands are used to enable services and applications to have their own OS instance, these
payloads can integrate, collaborate and be managed similarly with the right platform
software. This can be drawn like this:
Since payloads can be combined into working systems from multiple sources, it is helpful to have
standardized ways to secure, deliver, deploy and manage them. To do that we have to define the
touchpoints between these payloads, standardize those interfaces, and standardize the management
actions that can be taken upon those payloads within the vehicle.
This standardization will allow automotive systems to be assembled from ready-made software
payloads within the automotive ecosystem regardless of whether they are in-house, third-party or
open source payloads. There are many initiatives within the automotive industry to create such
multi-service integration platforms, which I will collectively label Vehicle Integration Platform
(VIP) architecture. Many top automotive companies have already announced VIP technologies. Even
though some of those VIP initiatives are referred to as an OS, they offer much more than just an
operating system. VIPs include capabilities on top as an integration and management infrastructure
that helps connect and orchestrate vehicles while also separating vehicle services and vehicle
applications from the various execution environments and hardware that the VIP abstracts.
For VIP systems to be able to do their job, they need to be able to process software payloads from
various sources including open source, in-house teams and also from third-party ISVs and
sub-contractors. One thing that is missing is a way to describe these software payloads in a
standard way for a VIP to consume it. For example, if a payload offered self-describing metadata
that told the VIP what its resource requirements were (e.g., memory, compute, services, reactivity,
etc.) and what deployment models it supports (e.g., migration, hitless software update,
suspend/resume, etc.), then the VIP would be able to learn how to integrate and run that payload
automatically.
With such metadata, the VIP software would be able to predict if the system can afford to run a
vehicle service or vehicle application given the available vehicle resources – without trying and
failing, or without denying resources to some other possibly higher-priority application. Once we
do this, we will be a step closer to achieving software hyperintegration, which is highly-
automated software integration.
This is the type of challenge that is best solved under the guidance and collective expertise
offered through an industry alliance such as COVESA. Together, companies can create a standard
that enables low-code/no-code system hyperintegration of software from a standardized automotive
ecosystem. This allows companies building new VIP-based vehicles to integrate vehicle extensions,
services and applications from other organizations – and the converse is that it allows ISVs to
provide specialized ready-made software that can easily be integrated into any VIP-based vehicle.
Taking this road – everyone wins.