JOIN/SIGN UP
Already a Member? |
GET INVOLVED
Understanding and Engaging in COVESA Expert Groups & Projects |
COLLABORATIVE PROJECTS
HISTORICAL
SDV Telemetry Project |
Already a Member? |
Understanding and Engaging in COVESA Expert Groups & Projects |
SDV Telemetry Project |
By Peter Winzell, Lead Software Engineer, Volvo Cars
 During the Fall All Member Meeting in Dearborn last year, I presented some ideas around vehicle signal set matching. This is the problem we face when we need to have proprietary vehicle signals translated into Vehicle Signal Specification. This matching/mapping is a challenge the industry faces today and can take a significant amount of time to do manually. By using vehicle signal attributes such as name, description, unit, and datatype we proposed an algorithm that would be used to estimate just how close two signals from two disjunctive sets are. The algorithm can be summarized just by a simple formula like this:
During the Fall All Member Meeting in Dearborn last year, I presented some ideas around vehicle signal set matching. This is the problem we face when we need to have proprietary vehicle signals translated into Vehicle Signal Specification. This matching/mapping is a challenge the industry faces today and can take a significant amount of time to do manually. By using vehicle signal attributes such as name, description, unit, and datatype we proposed an algorithm that would be used to estimate just how close two signals from two disjunctive sets are. The algorithm can be summarized just by a simple formula like this:
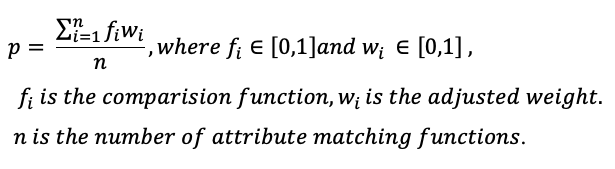
p is a number between 0..1, where the closer you get to 1, the more likely you will have signals that match.
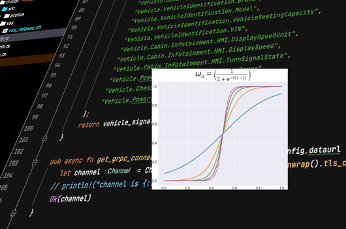
To improve on this (original paper: Ideas for Vehicle Signal Set Matchingt) I have some new ideas presented in a paper: Dynamic Weight Generation for Vehicle Signal Set Matching. Here we are replacing static weights that are used to value attributes with some functions that increase the weight depending on the result of a more highly ranked attribute. I decided to value the description attribute higher and use that value for the weight generation. We want the weight to reflect when we believe we have a match, but also at the same time reflect when we believe we do not have a match. This will make sure that units such as m/s are dynamically valued and should prove a better result when we rank matching candidates – at least that is the theory.
The paper explores 3 different mathematical one-variable functions with different complexity. I added a test to see how the different functions handle the comparison where we have signals that match and those that don’t although they share the same unit.
I welcome discussion and would like engage with others in solving this problem and turn it into a COVESA project. Please reach out, via COVESA Community Director if interested.